
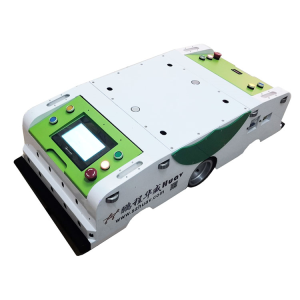
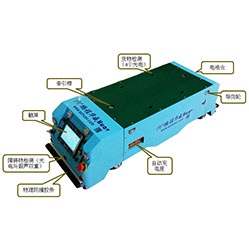
背負型(xíng)重載激光SLAM導(dǎo)航AGV詳細介紹 / Details產品名稱:背(bèi)負型重載激光SLAM導(dǎo)航AGV產品(pǐn)型號:HVS-2WD-DD-MM-UB-600產品規格:L900*W675*H300 現在聯係

潛伏型四(sì)驅雙向舉升式(shì)薄型AGV雙向四驅潛伏舉升式AGV應用於受限的空間場所,主要用於來回運送體積較大較重的貨物,可自動潛入到物料車底部(bù),利用(yòng)電(diàn)動舉升將物料車舉起(qǐ)通過(guò)磁條導引讀(dú)取指令,識別路口與站點運行達到指定位置,到達指定位置後AGV自動和物料車分離,然(rán)後鑽到空物料車的下麵,把空的物料車運(yùn)走(zǒu),進行(háng)往複運動(dòng)。 現在聯係
潛伏型(xíng)雙驅雙向牽(qiān)掛式AGV雙向雙驅潛伏牽引式AGV主要用於來回運送體積較大較重的(de)貨物(wù),可自動潛入到物料車底部,利用電動升降掛鉤牽引(yǐn)物料車通過磁條導引讀取(qǔ)指令,識(shí)別路口與站點運行達(dá)到指定位置,到(dào)達指定位置後AGV自(zì)動(dòng)和物料車分離,然(rán)後鑽到空物料(liào)車的下麵,把空的物料車運走,進行往複運動。 現在(zài)聯係
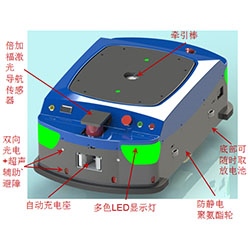
潛伏型牽掛式激光SLAM導航AGV詳細介紹 / Details產品名稱:潛伏型牽掛式激光SLAM導航AGV產品型號:HVS-2WD-DD-MM-UT-300產品規格:L850*W500*H30 現在聯係
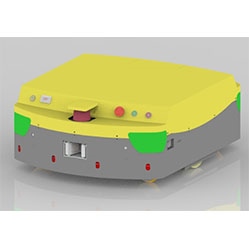
潛伏型重載舉升式激光SLAM導(dǎo)航AGV詳細介紹 / Details產(chǎn)品名稱(chēng):潛伏型重載舉升式激光SLAM導(dǎo)航AGV產品型(xíng)號:HVS-2WD-DD-MM-UL-600產品規(guī)格:L900*W675*H 現在聯係

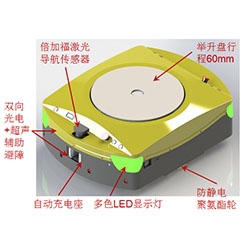
潛伏型雙驅雙向舉升式小(xiǎo)型AGV雙向雙驅潛伏舉升式AGV應用於受限的空間場所,主要用於來回運送體積較小較輕的貨物,可自動潛入(rù)到物料車底部,利用電動舉升將物料車舉起通過磁條導引讀取指令,識(shí)別(bié)路口與站點運行達到指定位置,到達指定位置後AGV自動和物料車分(fèn)離,然後鑽(zuàn)到空物(wù)料車的下麵(miàn),把空的物料車運(yùn)走,進行往複運動。 現在聯係(xì)

潛伏舉升(shēng)尾部牽引二合一型四驅雙向(xiàng)AGV雙向四驅(qū)潛伏舉升尾部牽(qiān)引二合一式AGV應用於受限的(de)空間場所,主要用於來回運送體積較大(dà)較重的貨物,可自動潛入到工裝(zhuāng)台車底部,利用(yòng)電動(dòng)舉升將台(tái)車舉起並在尾部掛多個牽引料車通過磁條導引讀取(qǔ)指(zhǐ)令,識別路口與站點運行達到指定位置,到達指定位置後AGV自動和工裝(zhuāng)台車(chē)分離,然後鑽到空台車的下麵 現在聯係
潛伏型四驅雙向牽(qiān)掛式AGV雙向四驅潛(qián)伏式AGV應用於受限的空間場所,主(zhǔ)要用於來回運送體積較大較(jiào)重的貨物,可自(zì)動潛入到物料車底(dǐ)部,利用電動升降(jiàng)掛鉤牽引物(wù)料車(chē)通過磁條導引讀取指令,識別路(lù)口與站(zhàn)點運行達到指定位置,到達指定位置後AGV自動(dòng)和物料車(chē)分離,後鑽到空(kōng)物料車的下麵,把空的物料車運走,進行往複運(yùn)動。 現在聯係

潛伏型四驅雙向舉升式(shì)AGV雙向四驅(qū)潛伏舉升式AGV應用於受限的空間場所,主要用於(yú)來(lái)回運送體積較大較(jiào)重(chóng)的貨物,可自動潛入到物料車底部,利用電動舉升將物料車舉起(qǐ)通過磁條(tiáo)導引讀取指(zhǐ)令,識別路口與站點(diǎn)運行達到指定位置,到達(dá)指定位置後AGV自動和物料車(chē)分離,然後鑽到空物料車的下麵,把空(kōng)的物料車運走,進行往(wǎng)複運(yùn)動。 現在聯係

AGV與MES.ERP對接係統AGV總控調度係統與倉(cāng)庫ERP或生產(chǎn)的MES係統通過協議對接進(jìn)行信號和數據互(hù)換。 現(xiàn)在聯係
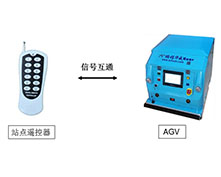
AGV遙控係統在車(chē)間工作人員處放在部手持遙控器(多按鈕),有物流運送需求時(shí)工作人員根據要去的站點按(àn)遙控器上相應站點號,信號燈亮,AGV收到任務信息在完成上一任務後,自動運行至指定站點停下(xià),待工作人員將物(wù)料推上(shàng)AGV滾筒架後,工作人員再按遙控器上要去的站點號,AGV再自動運行至指(zhǐ)定站點停下,待工 現在聯係
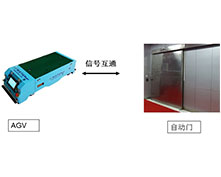
AGV與自動門對接係統當AGV運行到風淋門門口讀取地標指(zhǐ)令,AGV發送開門(mén)信號給風淋(lín)門,風淋門(mén)得到(dào)信號後開門,當門打開(kāi)後,風淋門返回門以(yǐ)開的信號,此(cǐ)時AGV啟動運行至風淋門內再讀取地標,反(fǎn)饋運行到位信號給風淋門關(guān)門(mén)。 現在聯係
深圳市91麻豆国产福利品精精密(mì)機械有(yǒu)限公司
是一家致力於無人搬運車(AGV)的研發、生產、銷售型高新科技企業
是一家致力於無人搬運車(AGV)的研發、生產、銷售型高新科技企業
全國谘詢熱線
13923417561
15989307926
15989307926
 91麻豆国产福利品精二維碼
91麻豆国产福利品精二維碼 91麻豆国产福利品精微信公眾號
91麻豆国产福利品精微信公眾號